


现在的位置:主页 > 综合新闻 >
原来PID向导编程这么简单!这下搞懂了~
【作者】网站采编
【关键词】
【摘要】使用以下方法之一打开 PID 向导:●在Micro/WIN SMART中的工具菜单中选择PID向导: 图2. 选择PID向导 第一步:定义需要配置的PID回路号 在此对话框中选择要组态的回路。最多可组态 8 个回
使用以下方法之一打开 PID 向导:●在Micro/WIN SMART中的工具菜单中选择PID向导:

图2. 选择PID向导
第一步:定义需要配置的PID回路号 在此对话框中选择要组态的回路。最多可组态 8 个回路。在此对话框上选择回路时,PID 向导左侧的树视图随组态该回路所需的所有节点一起更新。
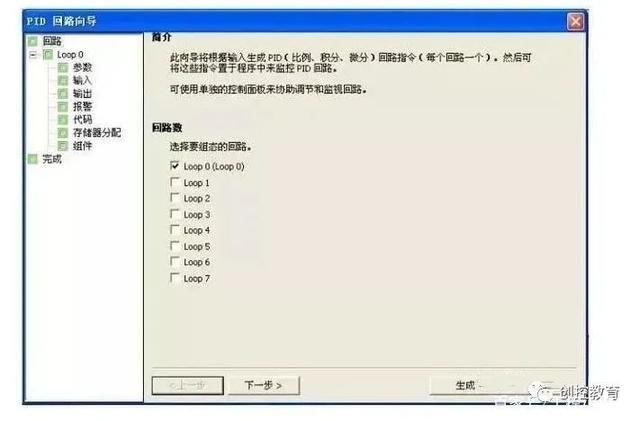
图3. 选择需要配置的回路
第二步:为回路组态命名
可为回路组态自定义名称。此部分的默认名称是“回路 x”,其中“x”等于回路编号。
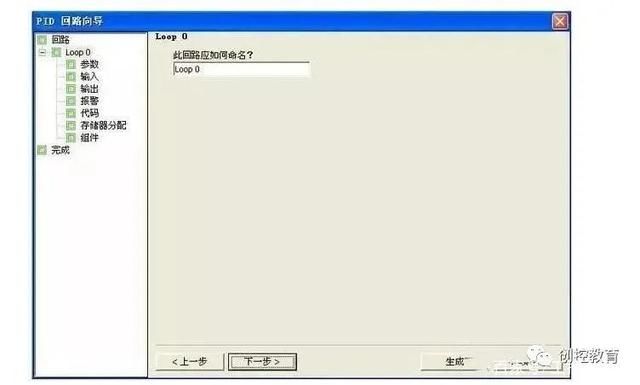
图4. 为PID回路命名
第三步:设定PID回路参数
图5. 设置PID参数
图5中定义了PID回路参数,这些参数都应当是实数:
1、增益: 即比例常数,默认值=1.00。
2、积分时间:如果不想要积分作用可以将该值设置很大(比如.0),默认值=10.00。
3、微分时间:如果不想要微分回路,可以把微分时间设为0 ,默认值=0.00。
4、采样时间:是PID控制回路对反馈采样和重新计算输出值的时间间隔,,默认值=1.00。在向导完成后,若想要修改此数,则必须返回向导中修改,不可在程序中或状态表中修改。
注意:关于具体的PID参数值,每一个项目都不一样,需要现场调试来定,没有所谓经验参数。
第四步:设定回路过程变量
图6. 设定PID输入过程变量
1、指定回路过程变量 (PV) 如何标定。可以从以下选项中选择:
单极性:即输入的信号为正,如0-10V或0-20mA等双极性:输入信号在从负到正的范围内变化。如输入信号为±10V、±5V等时选用选用20%偏移:如果输入为4-20mA则选单极性及此项,4mA是0-20mA信号的20%,所以选20% 偏移,即4mA对应5530,20mA对应。温度 x 10 °C温度 x 10 °F2、反馈输入取值范围
在a.设置为单极时,缺省值为0 - ,对应输入量程范围0 - 10V或0 - 20mA等,输入信号为正在a.设置为双极时,缺省的取值为- - +,对应的输入范围根据量程不同可以是±10V、±5V等在a.选中20% 偏移量时,取值范围为5530 - ,不可改变3、在“标定”(Scaling) 参数中,指定回路设定值 (SP) 如何标定。默认值是 0.0 和 100.0 之间的一个实数。
此反馈输入也可以是工程单位数值,参见:设置给定-反馈的量程范围。
第五步:设定输入回路输出选项
图7. 设定PID输出选项
1、输出类型可以选择模拟量输出或数字量输出。模拟量输出用来控制一些需要模拟量给定的设备,如比例阀、变频器等;数字量输出实际上是控制输出点的通、断状态按照一定的占空比变化,可以控制固态继电器(加热棒等)
2、选择模拟量则需设定回路输出变量值的范围,可以选择:
单极:单极性输出,可为0-10V或0-20mA等双极:双极性输出,可为正负10V或正负5V等单极20% 偏移量:如果选中20%偏移,使输出为4 - 20mA3、取值范围:
c为单极时,缺省值为 0 到
c为双极时,取值- 到
c为20%偏移量时,取值5530 - ,不可改变
如果选择了开关量输出,需要设定此循环周期,如图7所示:
图8. 设定PID输出为数字量
第六步:设定回路报警选项

图9. 设定回路报警限幅值
向导提供了三个输出来反映过程值(PV)的低值报警、高值报警及过程值模拟量模块错误状态。当报警条件满足时,输出置位为1。这些功能在选中了相应的选择框之后起作用。
使能低值报警并设定过程值(PV)报警的低值,此值为过程值的百分数,缺省值为0.10,即报警的低值为过程值的10%。此值最低可设为0.01,即满量程的1%使能高值报警并设定过程值(PV)报警的高值,此值为过程值的百分数,缺省值为0.90,即报警的高值为过程值的90%。此值最高可设为1.00,即满量程的100%
文章来源:《电脑编程技巧与维护》 网址: http://www.dnbcjqywh.cn/zonghexinwen/2021/0210/677.html
电脑编程技巧与维护投稿 | 电脑编程技巧与维护编辑部| 电脑编程技巧与维护版面费 | 电脑编程技巧与维护论文发表 | 电脑编程技巧与维护最新目录
Copyright © 2018 《电脑编程技巧与维护》杂志社 版权所有
投稿电话: 投稿邮箱: